
Исследователи опубликовали статью под названием "Непрерывная адаптивная манипуляция походками для трехпередних роботизированных рук с использованием биовдохновленных контактов на кончиках пальцев" в журнале Biomimetic Intelligence and Robotics, в которой рассматриваются техники улучшения ловкости и адаптивности трехпередних роботизированных рук с помощью биомиметических подходов.
Исследование зафиксировало данные о движении человеческих пальцев с использованием оптической 3D системы захвата движений NOKOV, извлекло четыре элементарных движения и разработало стратегию управления gait на основе событий контакта с кончиками пальцев. Эксперименты подтвердили стабильность и надежность роботизированной руки при выполнении сложных задач и воздействии внешних помех, предоставив новые идеи для биомиметической манипуляции с высокой степенью свободы.
Цитата
Сяолун Ма, Цзяньхуа Чжан, Бинруй Ван, Цзинчэн Хуан, Гуандзюнь Бао, Непрерывная адаптивная манипуляция гaits для роботизированных рук с тремя пальцами через вдохновленные биологией события контакта кончиков пальцев, Биомиметическая интеллект и робототехника, Том 4, Выпуск 1, 2024, 100144, ISSN 2667-3797.
Фон исследования и проблемы
Традиционные методы манипуляции с помощью роботизированных рук зависят от заранее определенных траекторий, что не позволяет им адаптироваться к изменениям в окружающей среде и внешним помехам. Основные проблемы включают управление силой и движением в многопальцевом взаимодействии, изменения контактных точек и схем захвата, настройку обратной связи по силе в реальном времени и то, как адаптивно переключать движенческие примитивы для обеспечения стабильной манипуляции.
Решение этих проблем требует разработки стратегии управления, которая может настраивать движения на основе обратной связи о контактной силе в реальном времени, обеспечивая тем самым эффективное и надежное выполнение манипуляционных задач в неопределенных условиях.
Вклад в исследования
Реализована стратегия управления движениями человеческого пальца, при которой движения пальцев в роботизированной руке динамически переключаются на основе обратной связи о силе контакта.
Использовано четыре примитива движения для составления цифровых маневров при манипуляции объектами.
Проанализированы контактные события между кончиками пальцев и объектом, что выявило непрерывные трансляционные и вращательные манипуляции робота в течение одного цикла. Экспериментальная проверка подтвердила осуществимость и надежность данного подхода. Более того, даже когда объект подвергается возмущениям со стороны внешних сил, роботизированная рука может оперативно подстраивать свою работу, чтобы реагировать на любое вмешательство.
Методология
Стратегия управления походкой, вдохновленная человеком
Данные трехмерного движения человеческих пальцев и поверхности сферического объекта были собраны с использованием системы захвата движения NOKOV. Отражающие маркеры были размещены на трех пальцах (большом, указательном и среднем) и на поверхности сферы, а 8 камер фиксировали координаты, скорость и ускорение каждого маркера.
Эти высокоточные данные были использованы для анализа траекторий, режимов движения и динамических изменений контактных сил кончика пальца, что обеспечивает теоретическую поддержку при планировании походки роботизированной руки.

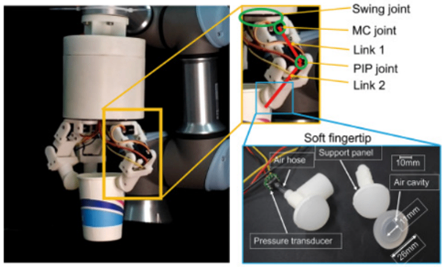
Дизайн роботизированной руки с тремя пальцами
Была разработана роботизированная рука с тремя пальцами, каждый из которых оснащён суставами с тремя степенями свободы (DOF) и гибкими датчиками, позволяющими в реальном времени воспринимать контактные усилия.
Предложена стратегия управления, основанная на примитивах движения, при которой режим походки переключается с помощью сигналов обратной связи о силе в реальном времени для обеспечения стабильности во время операций.
Эксперименты и результаты
Эксперимент по управлению адаптивным переключением походки:
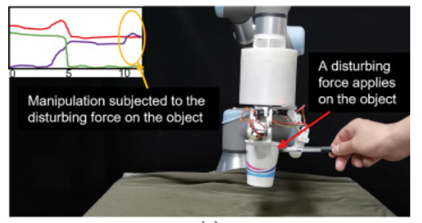
Манипуляция бумажным стаканом использовалась в качестве экспериментального задания. Роботизированная рука отрегулировала положение пальца для завершения захвата, а сенсоры фиксировали силу контакта между кончиком пальца и объектом.
Временные интервалы походки были скорректированы на основе сигналов обратной связи о силе в реальном времени, а воздействие внешних возмущений на стабильность захвата было мониторировано.
В этом процессе была использована система захвата движений NOKOV для получения угловой скорости объекта, и в сочетании с данными датчиков контактной силы, цикл ходьбы корректировался в реальном времени для обеспечения непрерывной и стабильной работы.

Настройка походки во время эксперимента с непрерывной работой:
Когда произошло внешнее вмешательство, роботизированная рука обнаружила изменения в контактной силе и остановила текущий шаг, вернувшись в безопасный режим шага для восстановления баланса сил.
После устранения помех роботизированная рука смогла вернуться к первоначальной последовательности движений и продолжить операцию.
Экспериментальные результаты:
Экспериментальные результаты подтвердили эффективность и надежность предложенной стратегии управления. Механизм обратной связи с силой в реальном времени, основанный на контактных событиях, позволил роботизированной руке гибко реагировать на динамические условия и внешние помехи, успешно достигая непрерывной работы в сложных задачах.
Система оптического захвата движения NOKOV обеспечивала высокоточные данные о движениях человеческих пальцев и угловую скорость захватываемого роботом объекта, что позволяло роботизированной руке в реальном времени корректировать движения пальцев и адаптивно переключать режимы работы, тем самым достигая гибкого манипулирования объектом.



